Isfahan University of Technology
Software Radio Course Project ( spring-summer 2007)
Shima Kheradmand
Timing Recovery:
2 Basic Functions for Digital Timing Recovery
Derivation of Synchronization Algorithm
2.NDA by Spectral Estimation
NDA Timing Parameter Estimation by Spectral Estimation
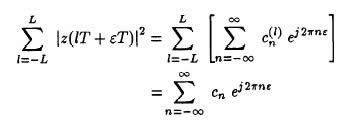
Consider the following objective function:assume a symmetric observation interval [-L, L].For a sufficiently large number N of transmitted symbols (N >> L) the process ]z( IT + ET) I2 is (almost) cyclostationary in the observation interval. A cyclostationary process has a Fourier series representation:
where the coefficients are random variables defined by:
as a consequence we have:
where:
It is proved only three coefficients {c-1,c0,c1} have nonzero mean hence if
L(ε) is approximated with its average clearly :
and this results in:
Although this approach solve the problem of maximum search algorithms ,
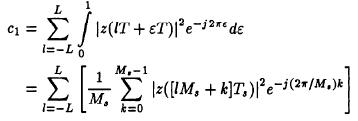
only digital algorithms are of interest here while c1 is defined by a summation of
(2L+1) integrals, but provided the sampling rate l/T, is such that the sampling theorem
is fulfilled for |z(t)|^2 [and not only for z(t)], i.e. :
the coefficients c1, c0 can be computed by a discrete Fourier transform (DFT).
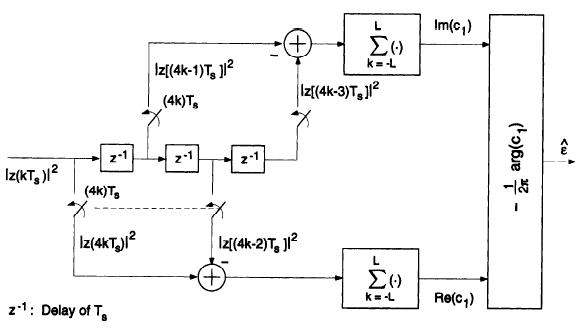
Let us denote by the integer Ms the (nominal) ratio between sampling and symbol
rate, Ms = T/Ts. For the samples taken at kTs:
The following figure illustrates a simple implementation for Ms=4:
Three following methods based on this spectral estimation with an itterative
algorithm figure on finding timing estimation (ε):
1. Early-late gate
2. Gradient-based
3. Tone-extraction
about which there are more details in "Signal Processing Techniques
for Software Radio " Book , Behrouz Farhang-Boroujeny,chapter 10 .
homeshima_kheradmand@yahoo.com