Home > Spectrum Managment > Spectrum Sensing > Transmitter Detection > Match Filter Detection
Power-based sensing is prone to false detections since it only measures signal power and could be easily triggered by unintended signals. The above discussion also shows that power-based sensing works poorly at low SNRs – when every 1 dB reduction in SNR requires 2 dB increase in the summing buffer size NB to maintain the same sensing error. Both of these problems are addressed in waveform-based sensing, which is usually based on correlation with known signal patterns. Waveform-based sensing is performed in time domain. We use the received signal representation as
![]()
where x(n) is the target signal; z(n) is the white Gaussian noise; and n the sample index in the case of time-domain sensing, or FFT symbol index in the case of frequency-domain sensing. For simplicity of derivation, we will assume the signal sample x(n)s are independent.
We assume
the known time-domain signal pattern contains NB signal
samples. Consider the following waveform sensing
metric:
When there is no signal present, the sensing metric is
When there is signal present, the sensing metric is

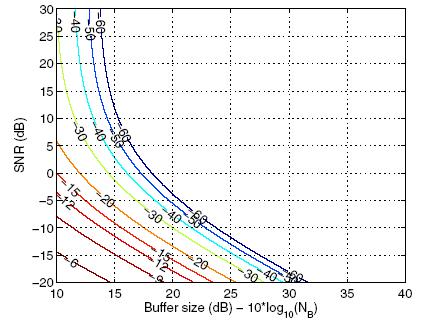
The sensing metric can be approximated as a Gaussian random variable when NB is large. Based on the similar arguments on the Energy Detection, the sensing error floor for waveform-based sensing is:

Following figure shows waveform-based sensing can achieve good performance even at low SNR as long as NB is sufficiently large. In a practical shadowing environment, cognitive users may receive drastically different signal strengths (and thus SNRs) at different locations. An alternative to use a very large NB to account for the worstcase shadowing scenarios is to allow sensing information sharing among local cognitive users so that sensing is performed collectively rather than individually to reduce the effect of shadowing