Home > Spectrum Managment > Spectrum Sensing >Cooperative Detection
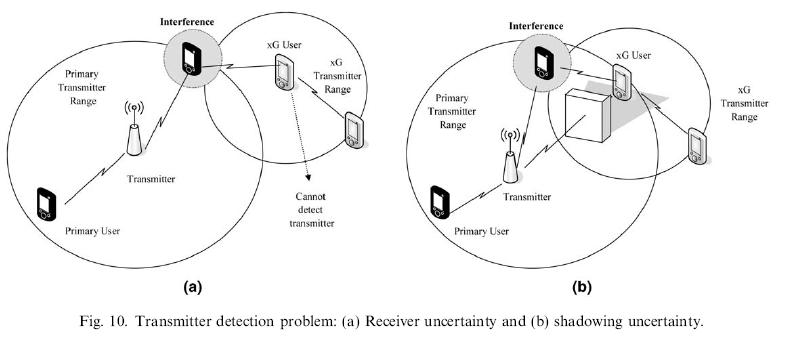
The assumption of the primary transmitter detection is that the locations of the primary receivers are unknown due to the absence of signalling between primary users and the xG users. Therefore, the cognitive radio should rely on only weak primary transmitter signals based on the local observation of the xG user . However, in most cases, an xG network is physically separated from the primary network so there is no interaction between them. Thus, with the transmitter detection, the xG user cannot avoid the interference due to the lack of the primary receiver’s information as depicted in Fig. 10(a). Moreover, the transmitter detection model cannot prevent the hidden terminal problem. An xG transmitter can have a good line-of-sight to a receiver, but may not be able to detect the transmitter due to the shadowing as shown in Fig. 10(b). Consequently, the sensing information from other users is required for more accurate detection. In the case of non-cooperative detection , the xG users detect the primary transmitter signal independently through their local observations. Cooperative detection refers tospectrum sensing methods where information from multiple xG users are incorporated for primary user detection. Cooperative detection can be implemented either in a centralized or in a distributed manner . In the centralized method, the xG base-station plays a role to gather all sensing information from the xG users and detect the spectrum holes. On the other hand, distributed solutions require exchange of observations among xG users. Cooperative detection among unlicensed users is theoretically more accurate since the uncertainty in a single user’s detection can be minimized . Moreover, the multipath fading and shadowing effect are the main factors that degrade the performance of primary user detection methods . However, cooperative detection schemes allow to mitigate the multi-path fading and shadowing effects, which improves the detection probability in a heavily shadowed environment .
Generally, the data transmission and sensing function are colocated in a single xG user device. However, this architecture can result in suboptimal spectrum decision due to possible conflicts between data transmission and sensing. In order to solve this problem, two distinct networks are deployed separately, i.e., the sensor network for cooperative spectrum sensing and the operational network for data transmission. The sensor network is deployed in the desired target area and senses the spectrum. A central controller processes the spectrum information collected from sensors and makes the spectrum occupancy map for the operational network. The operational network uses this information to determine the available spectrum.
While cooperative approaches provide more accurate sensing performance, they cause adverse effects on resource-constrained networks due to the additional operations and overhead traffic. Furthermore, the primary receiver uncertainty problem caused by the lack of the primary receiver location knowledge is still unsolved in the cooperative sensing.

